
| หน้าหลัก |
การเคลื่อนที่ของสิ่งมีชีวิตเซลล์เดียว |
|
|
การเคลื่อนที่ของคน
|
การเคลื่อนที่ของสิ่งมีชีวิต
สิ่งมีชีวิตมีการเคลื่อนไหว และ เคลื่อนที่แตกต่างกัน โดยอาศัยโครงสร้างที่ช่วยในการเคลื่อนไหวที่แตกต่างกัน เช่น สิ่งมีชีวิตเซลล์เดียวอาศัยโครงร่างค้ำจุนของเซลล์ (Cytoskeleton) ช่วยในการเคลื่อนที่ ส่วนคนและสัตว์มีกระดูกสันหลังเคลื่อนที่โดยอาศัยการทำงานร่วมกันของโครงกระดูก กล้ามเนื้อ และข้อต่อ
การเคลื่อนที่ของสิ่งมีชีวิตเซลล์เดียว:
อาศัยโครงร่างค้ำจุนภายในเซลล์เพื่อให้เซลล์คงรูปร่าง เรียก โครงสร้างเหล่านี้ว่า ไซโทสเกเลตอน (Cytoskeleton)
ไซโทสเกเลตอน (Cytoskeleton):: คือ โครงสร้างภายในเซลล์ ประกอบด้วยเส้นใยที่ประสานกันเป็นร่างแห แทรกตัวอยู่ภายใน cytoplasm ทำหน้าที่เป็นโครงร่างภายในเพื่อรักษารูปทรงหรือเปลี่ยนรูปทรง และทำให้เกิดการเคลื่อนไหวภายใน cytoplasm และการเคลื่อนที่ของเซลล์บางชนิด
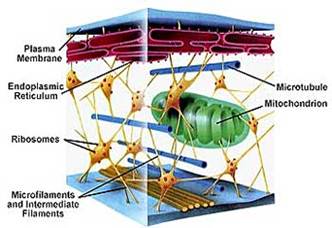 |
| ภาพ โครงสร้างของไซโทสเกเลตอนภายในเซลล์ |
ไซโทสเกเลตอน (Cytoskeleton) ประกอบด้วย
1. ไมโครทูบูล (Microtubule) เป็นท่อตรงและกลวงประกอบด้วย tubulin protein ชนิด alpha-tubulin
และ Bata-tubulin ขนาดเส้นผ่าศูนย์กลาง 25 nm
2. ไมโครฟิลาเมนท์ (Microfilament) เป็นเส้นใยทึบ 2 สายพันกันเป็นเกลียว ประกอบด้วย Actin Protein
3. ประกอบด้วยมัดของหน่วยย่อยโปรตีนที่พันกันเป็นเกลียว ขนาดเส้นผ่าศูนย์กลาง 6-12 nm
ประกอบด้วยโปรตีนหลายชนิด แล้วแต่ชนิดของเซลล์ เช่น keratin
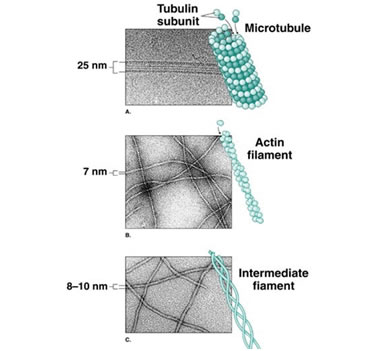 |
| ภาพเปรียบเทียบ ไซโทสเกเลตอนทั้ง 4 ชนิด |
สิ่งมีชีวิตเซลล์เดียวที่เคลื่อนที่โดยอาศัยเท้าเทียม (pseudopodium) ได้แก่
อะมีบา:: เคลื่อนที่โดยอาศัยการไหลของไซโทรพลาสซึม หรือเท้าเทียม (Pseudopodium(ชูโดโพเดียม)โดยการที่ไซโทรพลาสซึมจะไหลได้นั้นเกิดขึ้นจาก 3 ส่วนด้วยกัน คือ
1. เอ็กโทพลาสซึม (Ectoplasm) เป็นไซโทรพลาสซึมที่อยู่ข้างนอก มีลักษณะเป็นสารกึ่งแข็งกึ่งเหลว
เรียกว่า เจล (gel)
2. เอ็นโดพลาสซึม (Endoplasm) เป็นไซโทรพลาสซึมทีอยู่ด้านในมีลักษณะค่อนข้างเหลว
เรียกว่า โซล (sol)
3. ไมโครฟิลาเมนท์
การเกิดเท้าเทียม เกิดจาก การแยกตัวและรวมตัวของโปรตีนแอกติน ในไมโครฟิลาเมนท์ มีผลต่อการเปลี่ยนแปลงของไซโทรพลาซึม ดังนี้
- ทำให้เอนโดพลาสซึมไหลไปในทิศทางที่อะมีบาจะเคลื่อนที่แล้วปรับสภาพเป็นเอ็กโทพลาสซึม
- ส่วนเอ็กโทรพลาสซึมที่อยู่ด้านท้ายจะกลายเป็น เอนโดพลาซึม เป็นของเหลวไหลมาแทนที่เอนโดพลาสซึมที่เคลื่อนไปแล้ว
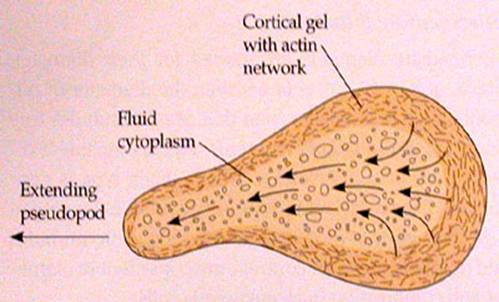 |
| ภาพ การไหลของไซโทรพลาซึมของอะมีบา |
ชมวิดีโอการเคลื่อนที่ของอะมีบา |
สิ่งมีชีวิตที่เคลื่อนที่โดยอาศัยซิเลียและแฟกเจลลัม
ได้แก่ยูกลีนา เคลื่อนที่โดยอาศัยการโบกพัดของแฟลเจลลัม (Flagellum) และ พารามีเชียม เคลื่อนที่โดยอาศัยการโบกพัดซิเลีย (Cilia)
โครงสร้างของซิเลีย และ แฟกเจลลัม
พบว่าภายในค้ำจุนด้วยไมโครทูบูล เรียงตัวเป็นวง 9 กลุ่ม กลุ่มละ 2 หลอด ตรงแกนกลางมีอีก 2 หลอดโดยไมโครทูบูลที่เรียงอยู่ตรงกลางจะมีเยื่อหุ้มเซลล์ล้อมรอบ ส่วนไมโครทูบูลที่เรียงเป็นวงอยู่โดยรอบจะมีโปรตีน ไดนีน (Dynein) เป็นเสมือนแขนที่เกาะกับไมโครทูบูล เรียกว่า ไดนีนอาร์ม (Dynein arm) ซึ่งโครงร่างค้ำจุ้นเหล่านี้ช่วยให้ซิเลีย และแฟลเจลลัม โค้งงอและสามารถโบกพัดได้
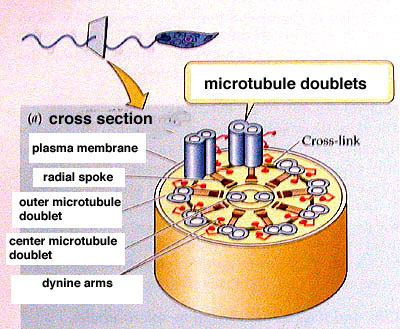 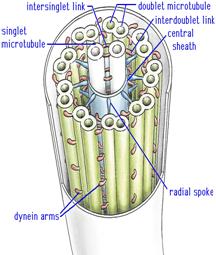 |
| ภาพ ภาคตัดขวางของไมโครทูบูล |
 |
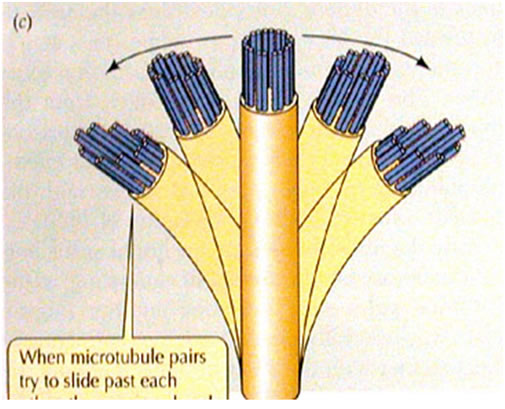 |
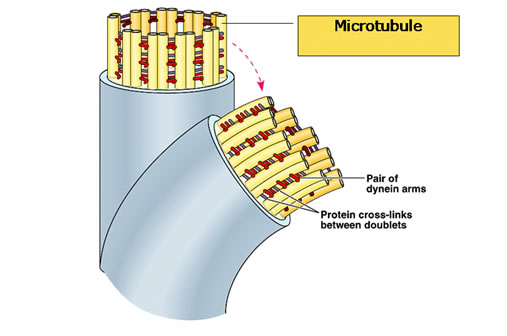
| ภาพ การทำงานของโปรตีนไดนีนทำให้ไมโครทูบูลมีการเคลื่อนไหว | ภาพ การโบกพัดของซิเลีย และแฟกเจลลัม |
บริเวณโคนของแฟลเจลลัมและซิเลียจะยึดติดโดยครงสร้างภายในเซลล์ที่เรียกว่า เบซัลบอดี
(Basal body) หรือไคนีโทโซม (Kinetosome) ซึ่งถ้าลองตัดส่วนนี้ออกพบว่าซิเลีย และแฟคเจลลัมจะเคลื่อนไหวไม่ได้ โดยโครงสร้างภายในของเบชัลบอดีค้ำจุนด้วยไมโครทูบูล เรียงตัว 9 กลุ่ม กลุ่มละ 3 หลอด
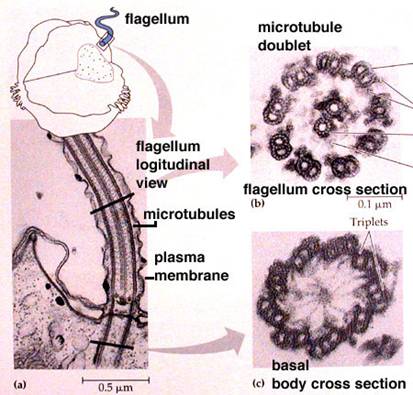 |
ภาพ เปรียบเทียบภาคตัดขวางของแฟกเจลลัม กับ เบซัลบอดี |
ชมวิดีโอการเคลื่อนที่โดยใช้ซิเลีย และ แฟกเจลลัม |
รวบรวมเรียบเรียงข้อมูลโดย ครูนันทนา สำเภา
โรงเรียนปทุมราชวงศา จังหวัดอำนาจเจริญ
